In this project, we introduce a system to construct a hierarchical 3D scene graph from dense mapping for high-level planning incrementally in real time. The proposed sys- tem leverages both the geometric information and hierarchical space structure of the environment and rich inter-objects semantic relationships. Besides, we demonstrate the idea of aggregation of semantic information by predicting the room class from the contained objects. Finally, we evaluate this system with our own multi-room environment, generated by photo-realistic simulator. The code of this project is archived as a standalone ROS package.
The overview of this system is shown as below:
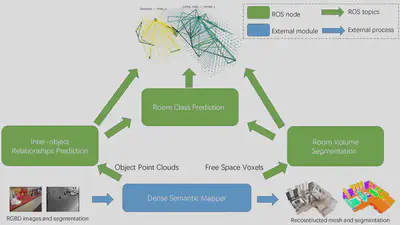
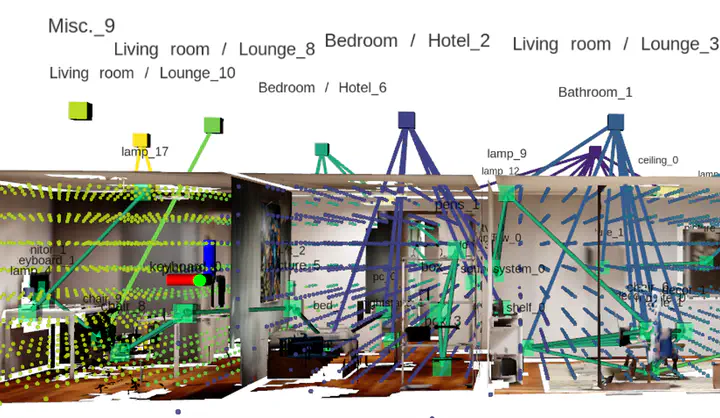
The pacakge runs on top of the modified Voxblox++, builds the 3D reconstruction of the scene on the fly, and predicts the class labels of object nodes, inter-objects relationships, room space segmentations, and room labels.